Por Gustavo Marinho, CFPHS | 02 de Janeiro de 2019
O que é CAN Bus?
CAN Bus foi originalmente desenvolvida em 1986 por Robert Bosch para indústria automotiva com o objetivo de reduzir o cabeamento elétrico instalado, que com cada vez mais e mais dispositivos sendo adicionados as máquinas começaram transformar as instalações elétricas complexas e impraticáveis.
Em 1993 o protocolo CAN foi adotado por fabricantes de motores (J1939) e assim sendo, como a maior parte dos motores de equipamentos móbil possuem motor com protocolo CAN ele foi subsequentemente adotado pela maior parte dos fabricantes de componentes hidráulicos.
Por que CAN Bus?
O Protocolo CAN Bus foi adotado por um grande número de indústrias pelas mesmas razões:
·Redução de custo de instalações elétricas;
·Redução de peso;
·Redução de complexidade;
·Melhoria de qualidade;
·Simplicidade para resolução de falhas;
·Redução de “Down time”.
O sistema de barramento CAN permite um processamento de controle flexível e informações do sensor. A partir desta informação, o sistema irá gerar os sinais elétricos necessários para controlar as funções do equipamento, válvulas ou comunicar com os movimentos do veículo. Todos os requisitos de cabeamento podem ser reduzidos a um cabo de barramento e a uma linha de fornecimento de energia.
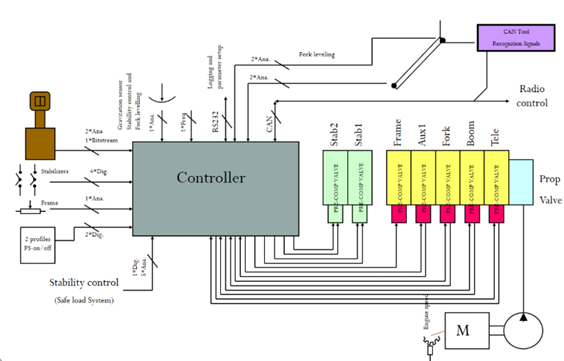
Estrutura de um equipamento com CAN Bus.
Os joysticks também estão disponíveis com a capacidade de comunicação do barramento CAN. CAN bus é uma via de comunicação que utiliza sinais codificados em uma rede de dois fios e direciona os sinais codificados para uma função programada em um veículo ou dentro do controle do equipamento. Associados a esses controladores de joystick estão os seguintes:
·Barramento CAN (OCI-3) – CanOpen, J1939;
·TSDE (Thumper solenoid driver electronics) on board;
·UFO (saída PWM PCB com porta trim pot para ajustes– a eletrônica do PWM é remotamente montada).
A solução do sistema de barramento CAN é mais comumente encontrada controlando válvulas acionadas eletricamente em sistemas hidráulicos móveis, mas os sistemas estão gradualmente ganhando terreno para o controle de máquinas e linhas em plantas industriais.
As áreas de aplicações alvo incluem autoridade local, colheita, silvicultura e maquinário de construção, bem como sistemas de elevação e posicionamento da lança. Nessas aplicações, as posições e velocidades lineares ou rotativas dos atuadores hidráulicos são controladas nos modos de malha aberta e/ou fechada. O sistema de barramento CAN representa uma solução ideal para aplicações de controle.