Hardware in the Loop (HIL) em Sistemas Hidráulicos
Aprenda as vantagens de simulações em HIL nos sistemas hidráulicos
Por Gustavo Marinho, CFPHS | 17 de Abril de 2021
Os sistemas e equipamentos hidráulicos vem evoluindo para um nível de complexidade e custo de desenvolvimento cada vez maiores, diante disto, novas técnicas e metodologias de predição de performance desses projetos também vem sendo foco de muitos especialistas em design. Simulações em Hardware-in-the-Loop (HIL) vem se popularizando muito rapidamente dentre projetistas de sistemas complexos, onde seja possível a modelagem da dinâmica do sistema com certo grau de precisão e fidelidade.
A metodologia HIL consiste na utilização de um modelo matemático-software para realizar a simulação de um hardware-equipamento-sistema complexo, custoso ou perigoso do ponto de vista de fabricação física. Com o hardware modelado em sua versão de software, torna-se possível então o desenvolvimento do restante do projeto (exemplo: software ou sistema de controle) e utilizando a integração do todo para predição da performance.
Imagem de um atuador eletro-hidráulico de uma máquina de torque com simulação de hardware em loop (HIL) usando software baseado em dinâmica de múltiplos corpos (multi-body-dynamics-based software).
Sumário
Simulações
Conforme mencionado, frequentemente, a dinâmica de um equipamento ou um sistema sendo projetado é simulada em tempo real seja porque o protótipo físico não está disponível ou porque experimentos com partes físicas reais em determinadas fases do projeto implicariam em um custo desnecessário devido ao tempo despendido e ao investimento monetário do mesmo.
Além de ser, em muitos casos, uma forma de evitar riscos desnecessários em projetos que possam comprometer, de alguma forma, a vida humana (ex. plantas nucleares, projetos de lançamentos de veículos espaciais, etc.) e esses são excelentes projetos para implementação de HIL.
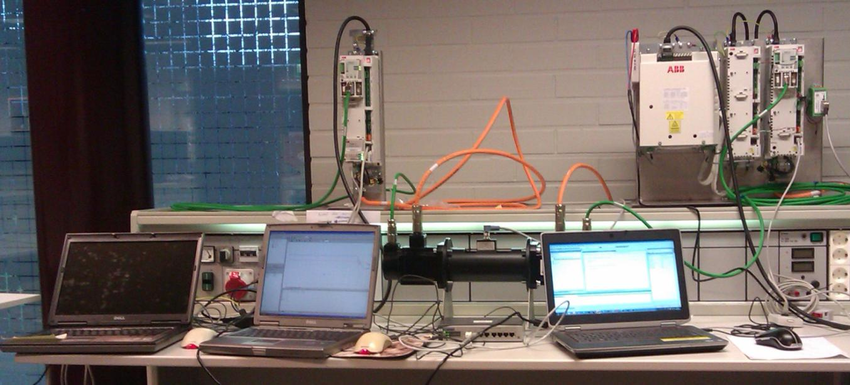
Exemplo de setup com implementação de HIL onde a maior parte dos componentes físicos serão em realidade componentes de software.
Hardware in the Loop
Umas das abordagens que mais prefiro para esse tipo de metodologia é conhecida como abordagem híbrida de HIL, na qual, duas técnicas de simulação em tempo real – hardware-in-the-loop e control prototype – são combinadas. Ou seja, partes do sistema são amiúde protótipos ou componentes físicos reais, enquanto outras são modelos simulados em tempo real.
Uma planta completa de um sistema mecatrônico complexo é tipicamente composta por múltiplos subsistemas que podem ser decompostos hierarquicamente até o nível de componente. Isso remete a uma consideração de que modelos simulados em tempo real em simulações HIL podem substituir não somente o sistema inteiro, mas também qualquer nível hierárquico do sistema que se deseja estudar em maior profundidade.
Imagem de um atuador eletro-hidráulico de um sistema HIL, na qual o componente da imagem consiste do control prototype de um sistema sendo simulado.
A técnica HIL tem se tornado uma abordagem cada vez mais interessante para diversos segmentos de atuação, sendo amplamente aplicada, principalmente na indústria automotiva, pelo fato de ser um dos segmentos de mercado mais competitivos na atualidade, onde compradores de veículos esperam alto nível de qualidade, segurança e funcionalidade. Tudo isso é acompanhado, naturalmente, por uma pressão por diminuição de custos e tempo de desenvolvimento.
Alguns anos atrás desenvolvi juntamente com um amigo um conceito de aplicação muito interessante para essa metodologia, na qual, nosso objetivo era desenvolver o sistema de controle (HMI e software) para um sistema de controle de nível, do qual como hardware utilizamos somente o PLC e algumas interfaces, todo o restante consistiu em hardwares modelados com suas versões em software. Tivemos uma economia significativa não só em tempo de fabricação, como custo de fabricação e tempo de início do projeto.
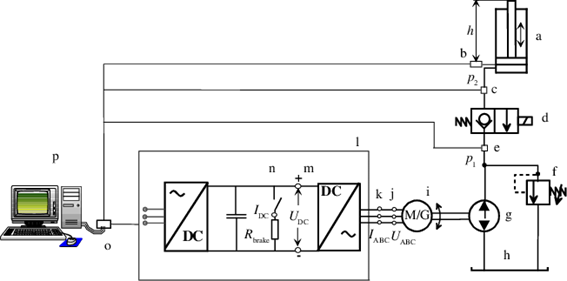
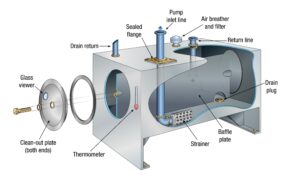
Modelo básico do sistema de nível projetado.
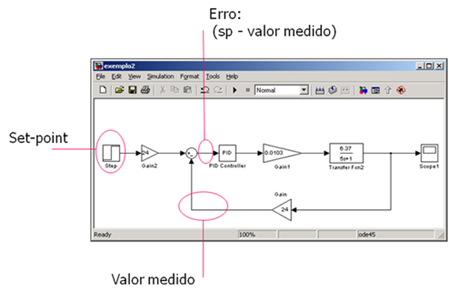
Para projeto do sistema de controle utilizamos o software Simulink e para elaboração e teste da estratégia de controle e já para implementação do sistema e interface homem máquina, utilizamos o software LabView.
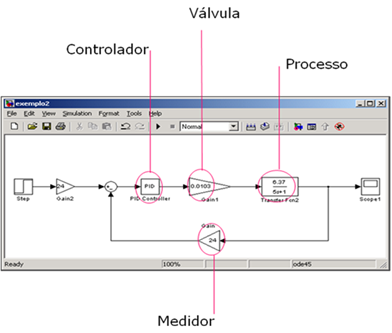
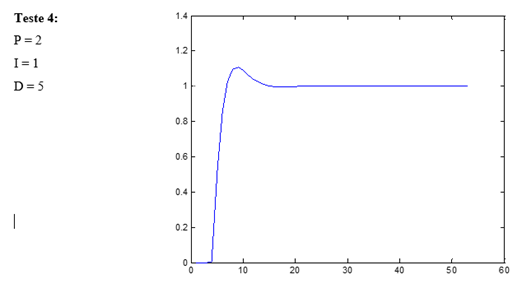
Figuras ilustrando a estratégia de controle, o controlador e plots realizados.
Através do Programa LabView, foi desenvolvida tanto a interface de controle da Planta Virtual como a interface com o operador. A interface gráfica da planta para controle remoto do operador foi desenvolvida com base nas estruturas visuais básicas de forma a não deixar a tela com quantidade desnecessária de informações, contaminando assim o campo visual do operador.
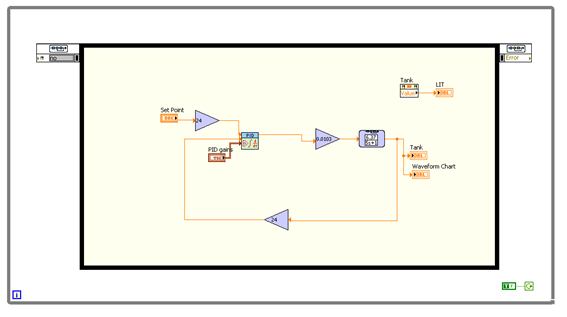
Controlador virtual desenvolvido no software LabView.
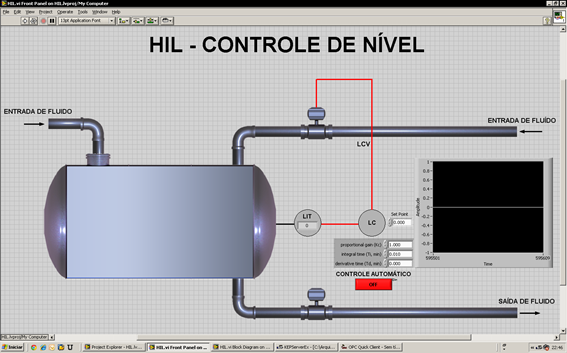
Tela de interface Gráfica.
A tela possui a opção de controle apenas da malha especificada, com a opção de inserir no painel de controle dos parâmetros do controlador de nível: os valores desejados das variáveis setpoint, ganho proporcional, ganho integral e ganho derivativo do controlador. O LIT indica o valor atual da variável nível no reservatório. A tela possui também um gráfico de amostragem dos resultados de estabilização do controlador.
O sistema físico de hardware utilizado, conforme mencionado, utilizamos somente um PLC SIMATIC-300 da Siemens, com a CPU 313-2C DP e seus periféricos básicos necessários.
Considerações e Aplicações
Com base no conteúdo apresentado, embora a complexidade de implementação possa parecer elevada, os ganhos obtidos através da implementação da técnica HIL não reside somente em custos, mas, também no aprofundamento do conhecimento acerca do projeto a ser desenvolvido devido aos levantamentos e desenvolvimentos de dados intrínsecos ao processo de desenvolvimento das estratégias de controle e modelagem para implementação da metodologia HIL ou Control Prototype por exemplo.
Acredito adicionalmente, que esse não somente é o futuro das estratégias de design de sistemas hidráulicos complexos, mas, também uma necessidade para a maior acuracidade do design dos mesmos.
Referências:
Artigo IFF-Campos: HARDWARE IN THE LOOP DE UMA PLANTA DE CONTROLE DE NÍVEL
A Idelica é a nossa plataforma educacional que tem como objetivo ajudar no desenvolvimento de estudantes, técnicos e engenheiros do ambiente industrial. Através de nossos cursos, simuladores e comunidade conseguimos fornecer um melhor aprendizado para o aluno.
Com a crescente procura de informações relacionadas a Indústria 4.0 e as novas tecnologias industriais, o Manual da Automação tem como objetivo agregar valor à área, fornecendo conteúdos de automação, sistemas de controle, mecatrônica, elétrica e eletrônica
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duração
Descrição
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.