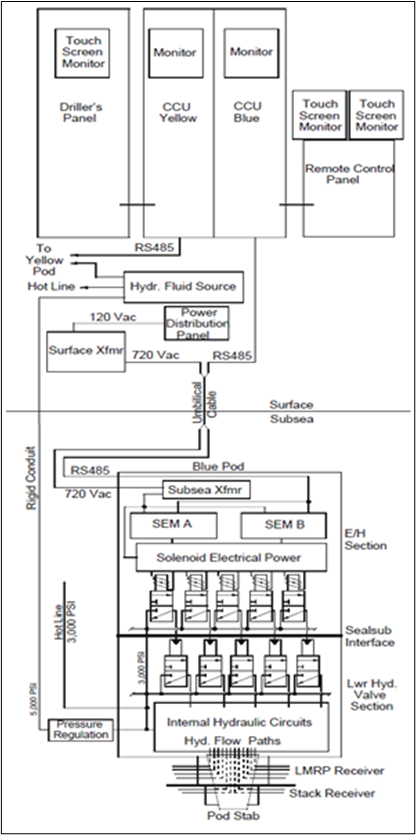
O BOP possui diferentes sistemas de controle, que variam de acordo com as particularidades do projeto de utilização, nos quais podem ser classificados em: controle hidráulico direto, pilotado ou multiplexado.
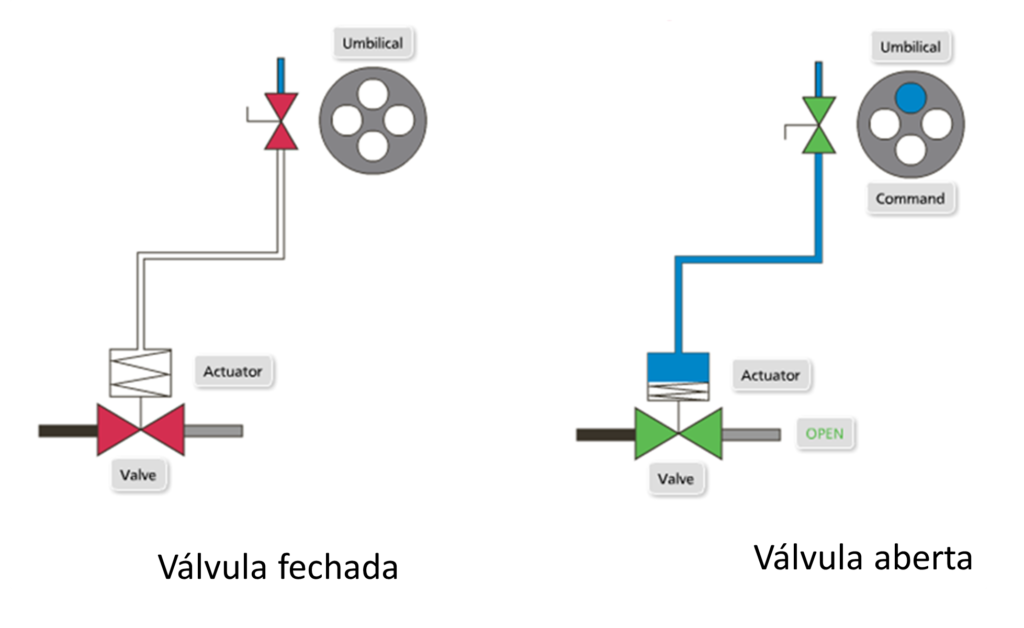
Os primeiros sistemas de controle remoto de BOP consistiam em linhas hidráulicas individuais conectadas a cada atuador do conjunto. São usadas válvulas para controlar o fluído hidráulico, abrindo e fechando os preventores e as válvulas do conjunto de alta pressão. Esse sistema é conhecido como sistema de controle hidráulico direto e é usado, principalmente, em sondas terrestres.
No final da década de 1930, a perfuração de poços de petróleo passou da terra para áreas pantanosas costeiras e baías rasas. As operações de perfuração nas baías rasas geralmente utilizavam plataformas de madeira montadas sobre estacas também de madeira. Na Louisiana, barcaças foram afundadas em canais dragados com profundidade de água de 1,2 a 2,4 metros e fixadas com estacas e palafitas de madeira.
O primeiro poço offshore foi perfurado perto de New Orleans, em 1947 e, à medida que a tecnologia de perfuração foi se desenvolvendo, as perfurações foram atingindo águas cada vez mais profundas.
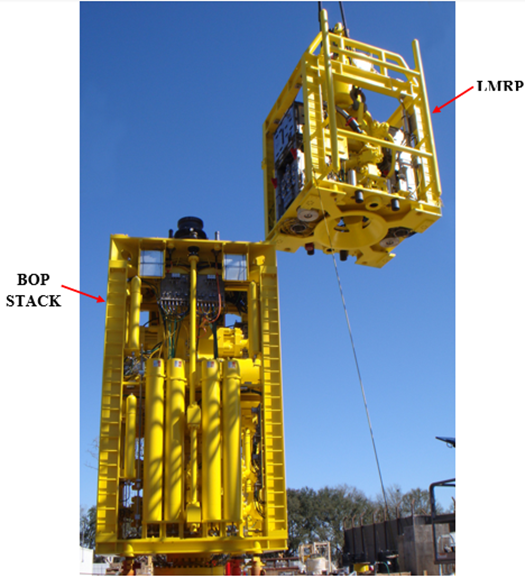
Inicialmente, o mesmo tipo de sistema de controle hidráulico direto de BOP usado em terra foi usado nas perfurações na costa marítima. O conjunto do blowout preventer (BOP) ficava localizado em uma plataforma ou no fundo da água, a pouca distância.
Podemos então classificar os três tipos de Sistemas de Controle dos Drilling BOPs conforme abaixo:
■ Controle Hidráulico Direto
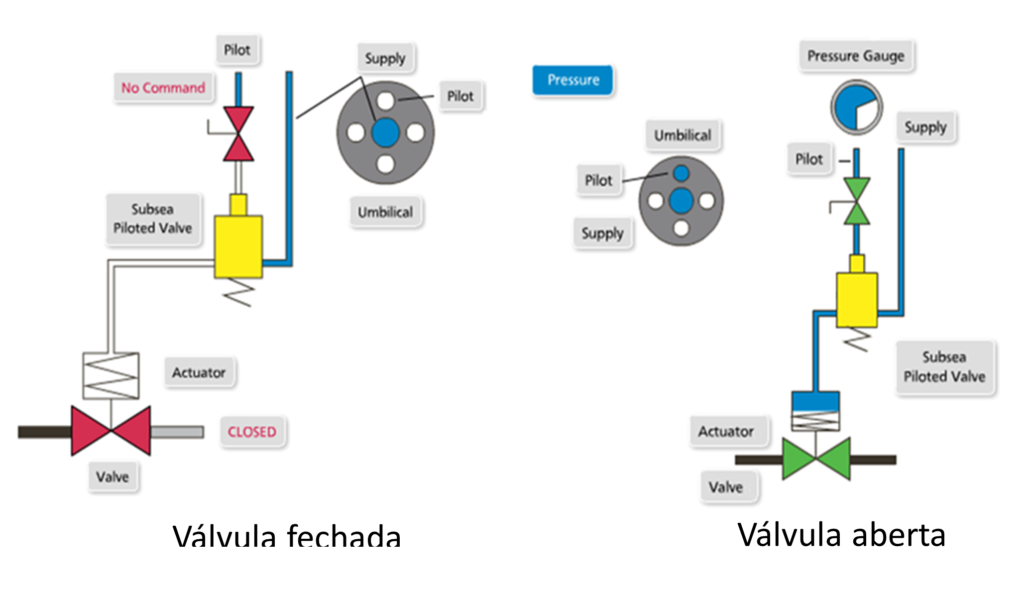
■ Controle Hidráulico Pilotado
■ Controle Multiplexado
A utilização de um determinado sistema de controle de BOP depende da distância/profundidade do poço:
■ Sistema Hidráulico Direto: Até 150 metros;
■ Sistema Hidráulico Pilotado: 1220 metros;
■ Sistema Multiplexado: Acima de 1220 metros.













Este post tem 13 comentários
Poderiam enviar para min este material em PDF sobre BOP
Claro. Vou te enviar agora mesmo por email.
Tbem quero esse material se possível!! Top demais
Paulovictornasci27@gmail.com
Tudo bem! Vou te enviar por email.
Tem como mandar pra mim, achei muito interessante, parabéns pela iniciativa.
vitorviana80@gmail.com
Tudo bem!
Gostaria de receber este material?Favor!
Tudo bem!
Parabéns amigo, é muito interessante poderia mandar isso para mim.
Gostei tanto do vídeo e também quero aproveitar esta oportunidade de me inscrever na formação.
Como eu faço pra me inscrever na formação?
Teria um Manual de Usuário do Sistema de Controle BOP Cameron (PODs)? Poderia enviar se possível para meu rmail
Desde já agradeço!!!
poderia por favor me enviar esse material?