Sistema Hidráulico em um ROV (Remoted Operated Vehicle)
Aprenda tudo sobre o ROV e o sistema hidráulico utilizado nele
Por Késsila Perdomo | 13 de Fevereiro de 2020
Argo foi o ROV utilizado para ajudar a encontrar os destroços
do Titanic 73 anos após o seu naufrágio. Esses equipamentos são verdadeiras “caixas”
tecnológicas aplicadas em diversos seguimentos industriais e possuem variados dispositivos
hidráulicos acoplados.
ROV em inglês quer dizer Remoted Operated Vehicle, ou seja, um
veículo subaquático operado remotamente. Ele é um tipo de robô,
eletro-hidráulico, formado por uma estrutura, flutuadores e equipamentos. O ROV
é operado pela superfície, que se comunica por intermédio de um cabo (umbilical),
recebendo potência e trocando dados. Pode ser utilizado para várias tarefas desde
inspeções a trabalhos subaquáticos em ambientes Offshore e Inshore. Neles são
conectadas inúmeras ferramentas, como: sonares de imagens, sonares
perfiladores, sonares 3D, filmadoras de vídeo e ferramentas como braços
manipuladores, serras rotativas, bombas dragas, furadeiras, etc.
Argo - Usado para encontrar o Titanic
Sumário
História do ROV
O primeiro ROV foi desenvolvido em 1950, pelo francês Dimitri Rebikoff, e sua primeira aplicação foi em arqueologia subaquática. Mas foi em 1966 que ele mostrou sua eficiência com a utilização do CURV (Veículo de Recuperação Submarina Controlada a Cabo) pela Marinha dos Estados Unidos para recuperar uma bomba de hidrogênio do fundo do mar Mediterrâneo.
CURV III
Entre os maiores avanços tecnológicos, destacam-se o uso de umbilicais ultrafinos e de propulsores magneticamente acoplados, resultando em maior facilidade e segurança de operação. No Brasil, os ROVs são aplicados no mercado de petróleo e gás, com a exploração de recursos em águas profundas e ainda na área portuária, em inspeções de cascos de navios e do cais.
ROV
Atualmente os acionamentos presentes em um ROV são feitos de forma hidráulica. Os ROVs utilizam bombas hidráulicas para sua propulsão, e para promover a energia necessária a seus equipamentos como, por exemplo, ferramentas de torque e braços manipuladores. A escolha por mecanismos hidráulicos está relacionada à relação de peso e potência.
O sistema hidráulico de um ROV pode ser divido em seis subsistemas:
·HPU (Unidade de Potência Hidráulica)
·APU (Unidade Hidráulica Auxiliar)
·TCU (Unidade de Controle dos Thrusters)
·HCU (Unidade de Controle Hidráulico)
·Compensadores
·Thrusters
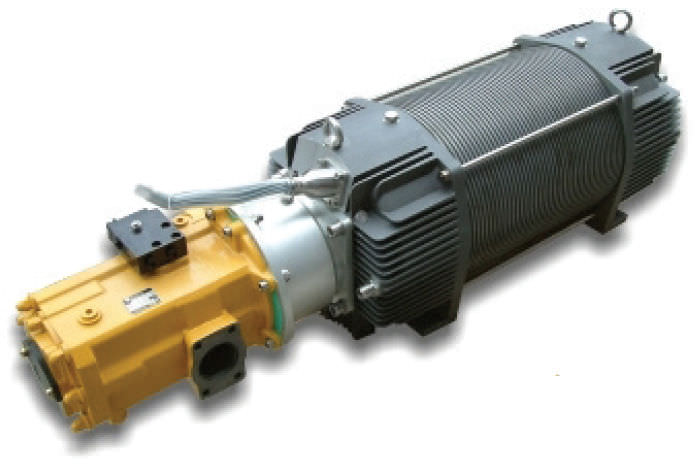
HPU (Unidade de Potência Hidráulica)
Este subsistema é composto por um motor elétrico acoplado a uma ou mais bombas hidráulicas. É monitorado por sensores de temperatura e vazão e transforma a energia elétrica que chega ao ROV em energia hidráulica.
APU (Unidade Hidráulica Auxiliar)
Este subsistema é também chamado de Charge Carter ou Deck Pack. Atua como uma fonte auxiliar de potência hidráulica e por isso é utilizado para testes na superfície. Além disso, alimenta o ROV ou ferramentas auxiliares.
TCU (Unidade de Controle dos Thrusters)
Este subsistema é controlado eletronicamente e alimentado com potência hidráulica. Ele é composto de Servo-válvulas que controlam o movimento dos propulsores e ferramentas especiais.
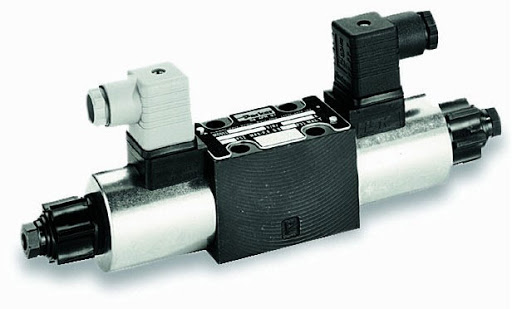
HCU (Unidade de Controle Hidráulico)
Este subsistema é composto por válvulas solenoides que controlam o manipulador de 5 funções, PAN/TILT da câmera e ferramentas auxiliares.
Compensadores
Este subsistema promove a compensação necessária ao circuito hidráulico, atuando de acordo com a pressão exercida pelo meio externo ao ROV. Portanto, a pressão no sistema compensado sempre deverá ser maior que a pressão externa devido a atuação da mola.
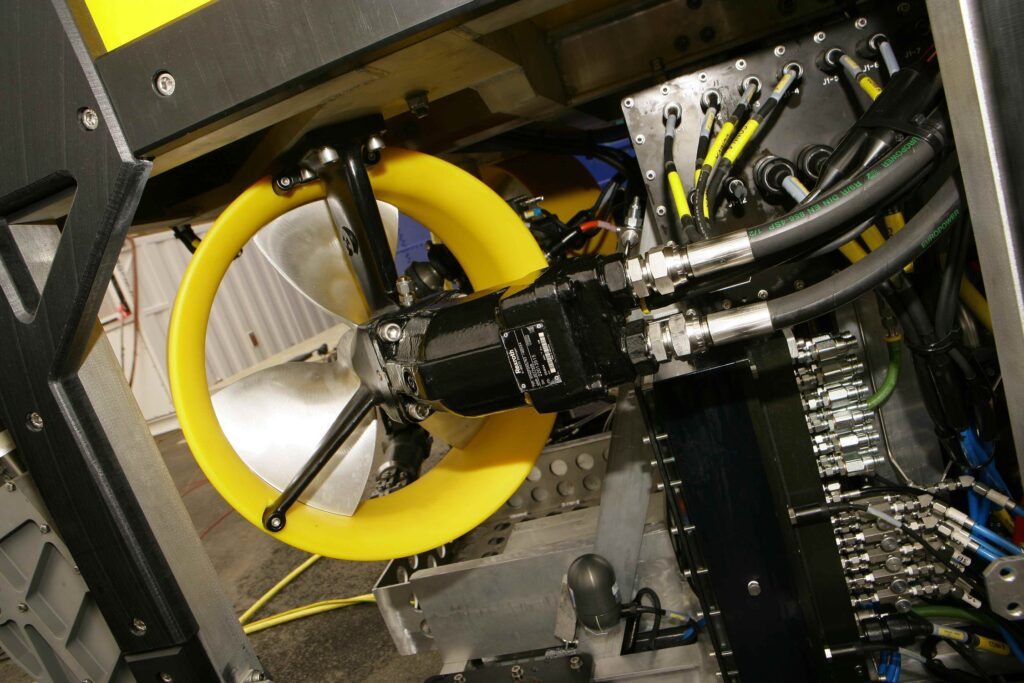
Thrusters
Este subsistema é responsável pelo controle dos movimentos do veículo. Os Thrusterspodem ser hidráulicos ou elétricos, dependendo da aplicação e do porte do veículo, eles variam em quantidade e disposição de montagem.
Disposição dos Thrusters
Os thrusters atuam de maneira que o conjunto realize o movimento desejado (joystick) conforme a ilustração:
As setas amarelas indicam o sentido do empuxo de cada thruster. As setas brancas indicam o sentido do fluxo de água. F– para frente e T– para trás.
Referências:
INTRODUÇÃO aos Sistemas ROV. Fugro, [s. l.], 2020.
DIÁRIO de um Piloto de ROV: O que é ROV? Como surgiu? Onde e porquê é utilizado? [S. l.], 2011. Disponível em: http://pilotorov.blogspot.com/2011/06/o-que-e-rov-como-surgiu-onde-e-porque-e.html. Acesso em: 12 fev. 2020.
A Idelica é a nossa plataforma educacional que tem como objetivo ajudar no desenvolvimento de estudantes, técnicos e engenheiros do ambiente industrial. Através de nossos cursos, simuladores e comunidade conseguimos fornecer um melhor aprendizado para o aluno.
Com a crescente procura de informações relacionadas a Indústria 4.0 e as novas tecnologias industriais, o Manual da Automação tem como objetivo agregar valor à área, fornecendo conteúdos de automação, sistemas de controle, mecatrônica, elétrica e eletrônica
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duração
Descrição
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.











")





Este post tem 4 comentários
I love this website – its so usefull and helpfull.
Thank you for the complements!
Excelente. Esse com certeza será o curso para a minha vida deslanchar.
Good .