Sistema Hidráulico em um ROV (Remoted Operated Vehicle)
H&P Admin
Sistema Hidráulico em um ROV (Remoted Operated Vehicle)
Aprenda tudo sobre o ROV e o sistema hidráulico utilizado nele
Por Késsila Perdomo | 13 de Fevereiro de 2020
Argo foi o ROV utilizado para ajudar a encontrar os destroços
do Titanic 73 anos após o seu naufrágio. Esses equipamentos são verdadeiras “caixas”
tecnológicas aplicadas em diversos seguimentos industriais e possuem variados dispositivos
hidráulicos acoplados.
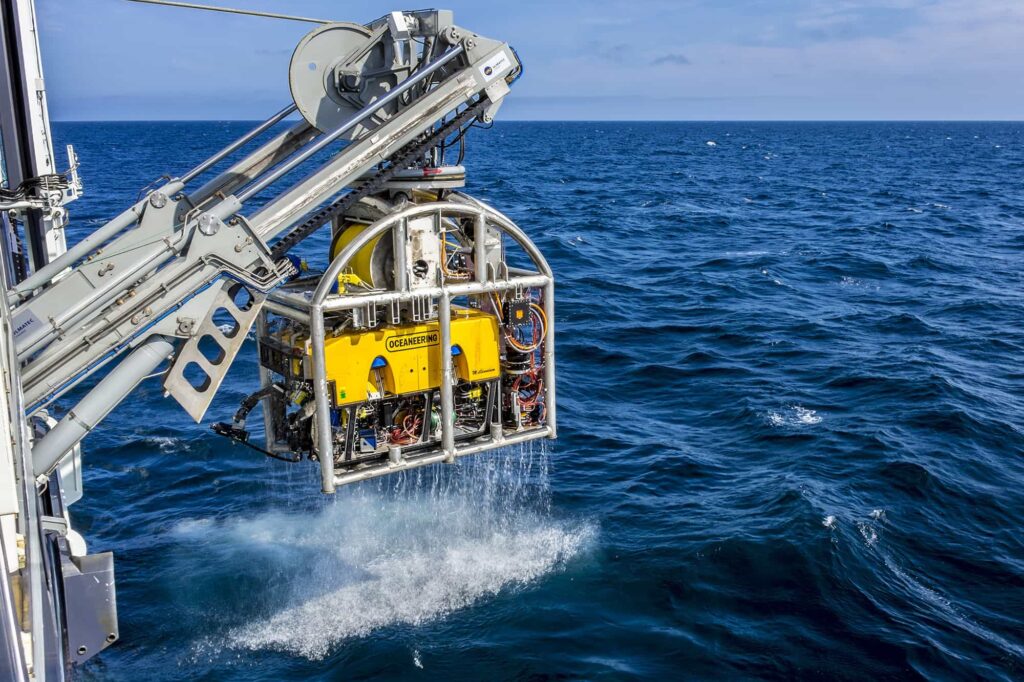
ROV em inglês quer dizer Remoted Operated Vehicle, ou seja, um
veículo subaquático operado remotamente. Ele é um tipo de robô,
eletro-hidráulico, formado por uma estrutura, flutuadores e equipamentos. O ROV
é operado pela superfície, que se comunica por intermédio de um cabo (umbilical),
recebendo potência e trocando dados. Pode ser utilizado para várias tarefas desde
inspeções a trabalhos subaquáticos em ambientes Offshore e Inshore. Neles são
conectadas inúmeras ferramentas, como: sonares de imagens, sonares
perfiladores, sonares 3D, filmadoras de vídeo e ferramentas como braços
manipuladores, serras rotativas, bombas dragas, furadeiras, etc.
Argo - Usado para encontrar o Titanic
Sumário
História do ROV
O primeiro ROV foi desenvolvido em 1950, pelo francês Dimitri Rebikoff, e sua primeira aplicação foi em arqueologia subaquática. Mas foi em 1966 que ele mostrou sua eficiência com a utilização do CURV (Veículo de Recuperação Submarina Controlada a Cabo) pela Marinha dos Estados Unidos para recuperar uma bomba de hidrogênio do fundo do mar Mediterrâneo.
CURV III
Entre os maiores avanços tecnológicos, destacam-se o uso de umbilicais ultrafinos e de propulsores magneticamente acoplados, resultando em maior facilidade e segurança de operação. No Brasil, os ROVs são aplicados no mercado de petróleo e gás, com a exploração de recursos em águas profundas e ainda na área portuária, em inspeções de cascos de navios e do cais.
ROV
Atualmente os acionamentos presentes em um ROV são feitos de forma hidráulica. Os ROVs utilizam bombas hidráulicas para sua propulsão, e para promover a energia necessária a seus equipamentos como, por exemplo, ferramentas de torque e braços manipuladores. A escolha por mecanismos hidráulicos está relacionada à relação de peso e potência.
O sistema hidráulico de um ROV pode ser divido em seis subsistemas:
·HPU (Unidade de Potência Hidráulica)
·APU (Unidade Hidráulica Auxiliar)
·TCU (Unidade de Controle dos Thrusters)
·HCU (Unidade de Controle Hidráulico)
·Compensadores
·Thrusters
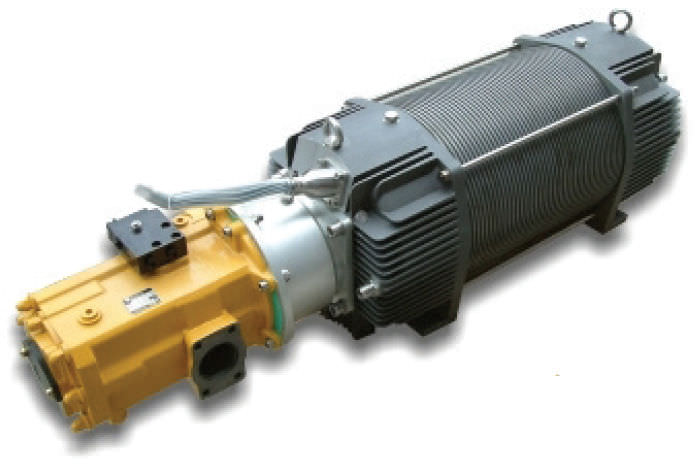
HPU (Unidade de Potência Hidráulica)
Este subsistema é composto por um motor elétrico acoplado a uma ou mais bombas hidráulicas. É monitorado por sensores de temperatura e vazão e transforma a energia elétrica que chega ao ROV em energia hidráulica.
APU (Unidade Hidráulica Auxiliar)
Este subsistema é também chamado de Charge Carter ou Deck Pack. Atua como uma fonte auxiliar de potência hidráulica e por isso é utilizado para testes na superfície. Além disso, alimenta o ROV ou ferramentas auxiliares.
TCU (Unidade de Controle dos Thrusters)
Este subsistema é controlado eletronicamente e alimentado com potência hidráulica. Ele é composto de Servo-válvulas que controlam o movimento dos propulsores e ferramentas especiais.
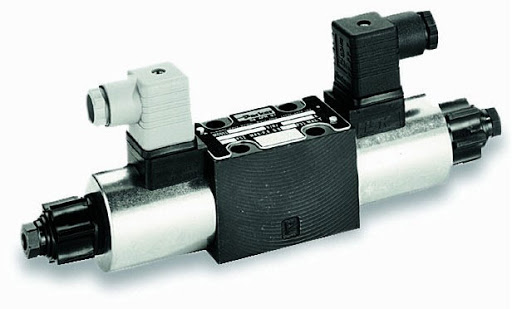
HCU (Unidade de Controle Hidráulico)
Este subsistema é composto por válvulas solenoides que controlam o manipulador de 5 funções, PAN/TILT da câmera e ferramentas auxiliares.
Compensadores
Este subsistema promove a compensação necessária ao circuito hidráulico, atuando de acordo com a pressão exercida pelo meio externo ao ROV. Portanto, a pressão no sistema compensado sempre deverá ser maior que a pressão externa devido a atuação da mola.
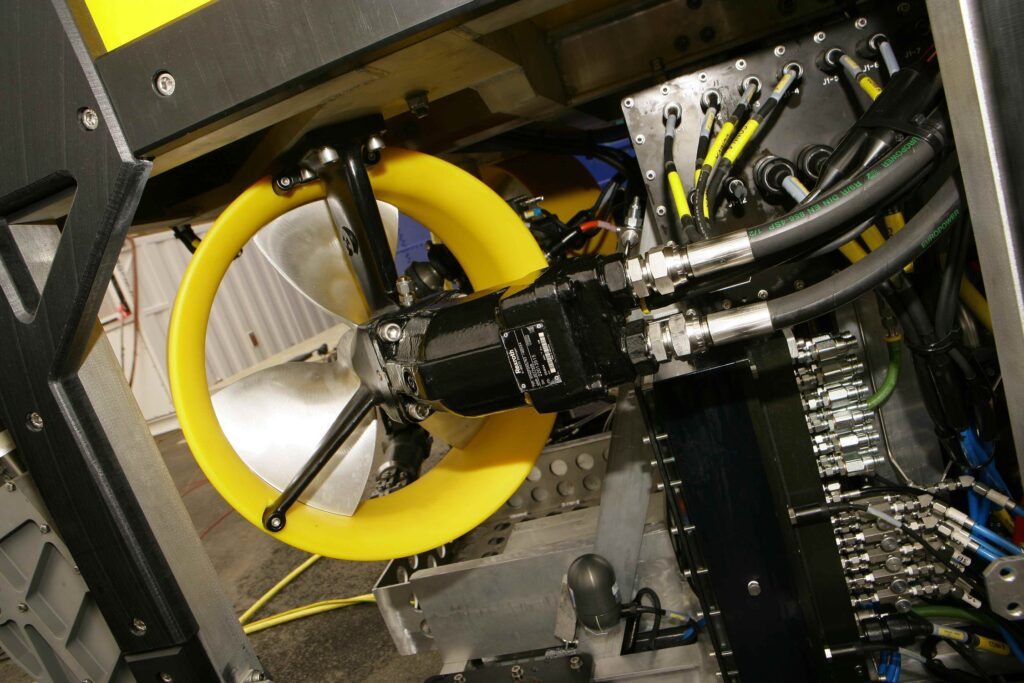
Thrusters
Este subsistema é responsável pelo controle dos movimentos do veículo. Os Thrusterspodem ser hidráulicos ou elétricos, dependendo da aplicação e do porte do veículo, eles variam em quantidade e disposição de montagem.
Disposição dos Thrusters
Os thrusters atuam de maneira que o conjunto realize o movimento desejado (joystick) conforme a ilustração:
As setas amarelas indicam o sentido do empuxo de cada thruster. As setas brancas indicam o sentido do fluxo de água. F– para frente e T– para trás.
Referências:
INTRODUÇÃO aos Sistemas ROV. Fugro, [s. l.], 2020.
DIÁRIO de um Piloto de ROV: O que é ROV? Como surgiu? Onde e porquê é utilizado? [S. l.], 2011. Disponível em: http://pilotorov.blogspot.com/2011/06/o-que-e-rov-como-surgiu-onde-e-porque-e.html. Acesso em: 12 fev. 2020.






















")







Este post tem 4 comentários
I love this website – its so usefull and helpfull.
Thank you for the complements!
Excelente. Esse com certeza será o curso para a minha vida deslanchar.
Good .